And, yes, while I acknowledge that there are differences between the two robots, I think that they also share many elements in common, not least cuteness!
But of course, Keepon is really famous for his dancing…
I may have shared that once already, but once just isn’t enough for that video.
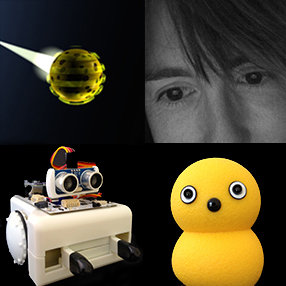
I’m really impressed by how expressive both Keepon and Tofu are, in particular by their ability to show where their “attention” lies. These robots are seemingly quite simple (although I’m sure the underlying technology is still pretty complex), but they show considerable possibilities as expressive and communicative robots.