I enjoyed the International Conference on Social Robotics a great deal, and I would now love to attend another robotics conference. Unfortunately, I’m still unsure about whether any paper I pitched would make it through review, because it would likely be so radically different from most of the papers being submitted. I suspect I will need to look for other opportunities like the Robots and Art workshop to help me with this, by allowing my work to exist on the edge of a main conference programme. The video of my presentation has now been uploaded online:
All the presentations from the workshop are available here.
Although not all of the research discussed during the rest of the conference was of direct interest to me, there were lots of things that I will take away from the papers that were presented and the posters that I saw. I’m planning on writing about some of the designs and concepts I saw here early next year.
It was clear to me as the conference progressed that my home really was at the Robots and Art: Misbehaving Machines workshop. All of the presentations on the workshop day were thought-provoking for me, and I loved the mix of art, design, technology and broad ideas about social interaction with humans. It was particularly good to present to some of people whose robots have inspired me to think and write about communication in recent years, and it was even better to find that they appreciated my analysis.
Although I have met Mari Velonaki twice before, it was great to see her again, and to hear a little about her more recent projects and the new collaborative laboratory venture that has just begun. I’m definitely planning another trip to Sydney so that I can catch up with Mari again properly and see what’s going on for myself.
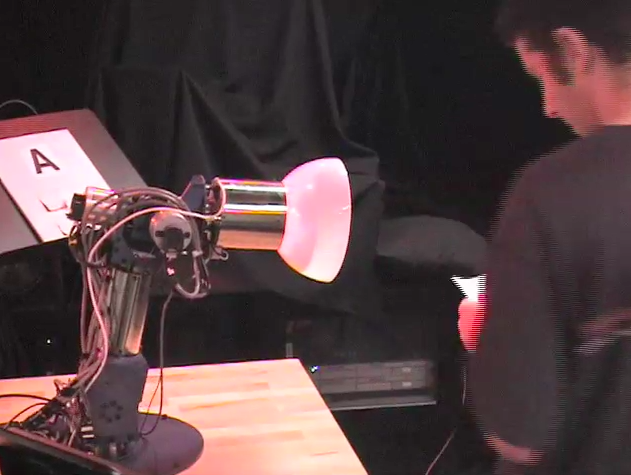
Another high point was meeting Guy Hoffman, and actually getting to talk to him at some length about fluency and interruption in communicating with robots of all different forms. I was greatly relieved to find that my understanding of his robotic desk lamp AUR’s interactions with humans was broadly correct, but I was also interested to gain a new insight into the underlying rhythm that was at work behind its responses to the task and a human’s instructions.